本篇总结学习了1978年Leslie Lamport发表在 Communications of the ACM 上的论文 Time, Clocks, and the Ordering of Events in a Distributed System。论文对分布式系统中的时间,时钟等概念做了深入的讨论,提出了“Happened Before”,“逻辑时钟”,“物理时钟”,“State Machine”等重要概念与算法,是分布式领域不能不读的经典论文。
1. 问题
在进入正题之前,首先让我们考虑如下问题:
$A$,$B$ 两人各自带着手表,在咖啡厅中喝咖啡,
- $A$ 喝完咖啡后看手表,读数为13:00。他声称“我在13:00喝完咖啡”。
- $B$ 喝完咖啡后看手表,读数为13:05。他声称“我在13:05喝完咖啡”。
假定两人都是诚实的,我们能说 $A$ 在 $B$ 之前喝完咖啡吗?
结论是不一定。由于我们并不知道两人的手表时间是否“准确”,即便两人诚实地说出了自己喝完咖啡时手表的读数,也并不能由此推论出孰先孰后。那么如果情形变成如下这样,结论又是如何呢?
- $A$ 喝完咖啡后看手表,读数为13:00,他声称“我在13:00喝完咖啡”。
- $A$ 喝完咖啡后,打了一通电话给 $B$。
- $B$ 在通话完毕后,喝完咖啡,看手表,读数为13:05。他声称“我在13:05喝完咖啡”。
在这种情形下,我们可以得知 $A$ 在通话前喝完咖啡,$B$ 在通话后喝完咖啡,故而必然有 $A$ 在 $B$ 之前喝完咖啡。一通电话使得彼此独立的两个时间体系产生了确定性的先后关系。
由上面的例子可见,我们通常使用的时钟读数、时间戳等概念并不能准确地刻画出事件发生的先后顺序。而在分布式系统中,事件发生的先后常常扮演着各种算法的“关键角色”。那么我们如何准确地刻画这种顺序,或是设计我们的时钟,从而准确的刻画这种先后顺序呢?
2. 时间是什么
The concept of time is fundamental to our way of thinking. It is derived from the more basic concept of the order in which events occur.
时间的定义对于分布式领域关于“事件发生先后”、“并发”等概念的认识至关重要。Lamport在文中指出,时间是由更加基本的概念“事件发生的顺序”衍生出来的。例如我们说某件事在13:00发生,其实是在说这件事发生在我们读到时钟上的读数为13:00之后,13:01之前。在此种定义下,时钟其实是通过读取时刻这一行为,对连续的时间进行了离散化的编号。
3. 分布式系统
本文中讨论的分布式系统,是由若干空间上分离的process组成。同一process上的事件顺序串行发生,process之间通过收发消息进行通信。这里的process可以是若干独立的计算机,独立的进程,亦或是一台计算机内独立的硬件模块。在后文中我们我们统称process为“节点”。特别的,我们应当注意各个节点之间的通信延迟,它与单个节点内部事件发生的频率相比是不可忽略的。
4. Happened Before 偏序关系
对于一个分布式系统中的若干事件,我们定义“happened before”关系,记为"$\rightarrow$"。其满足如下三个条件,
- 如果 $a$ 和 $b$ 是在相同节点上的两个事件,$a$ 在 $b$ 之前发生,则有 $a \rightarrow b$ 。
- 如果事件 $a$ 表示某个节点发送某条消息,$b$ 是另一个节点接受这条消息,则有 $a \rightarrow b$ 。
- 如果有 $a \rightarrow b$ 且 $b \rightarrow c$ ,则有 $a \rightarrow c$ 。
当且仅当 $a \nrightarrow b$ 且 $b \nrightarrow a$ 时,我们称两个事件为并发的(concurrent)。
此外,我们规定 $\rightarrow$ 为非自反关系,即 $a \nrightarrow a$ 。显然,说一件事发生在自己“之前”并无任何意义。
为了直观的描述这一关系,Lamport引入了如下图所示的“时空图”,图中垂直方向自下而上为时间发生顺序,水平方向为空间上的不同节点。图中的黑色圆点表示事件,波浪线箭头表示通信消息。
回顾上面的"happened before"关系, 我们不难在图中找到若干满足条件的事件对,例如 $p_1 \rightarrow r_4$,其由 $ p_1 \rightarrow q_2 \rightarrow q_4 \rightarrow r_3 \rightarrow r_4$ 推导而来。
图中亦有若干并发的事件,例如 $p_3$ 和 $q_3$,虽然在图中我们能看到 $p_3$ 发生的物理时间(physical time)晚于 $q_3$,但对于系统中的节点来说,他们并不知道谁先谁后。
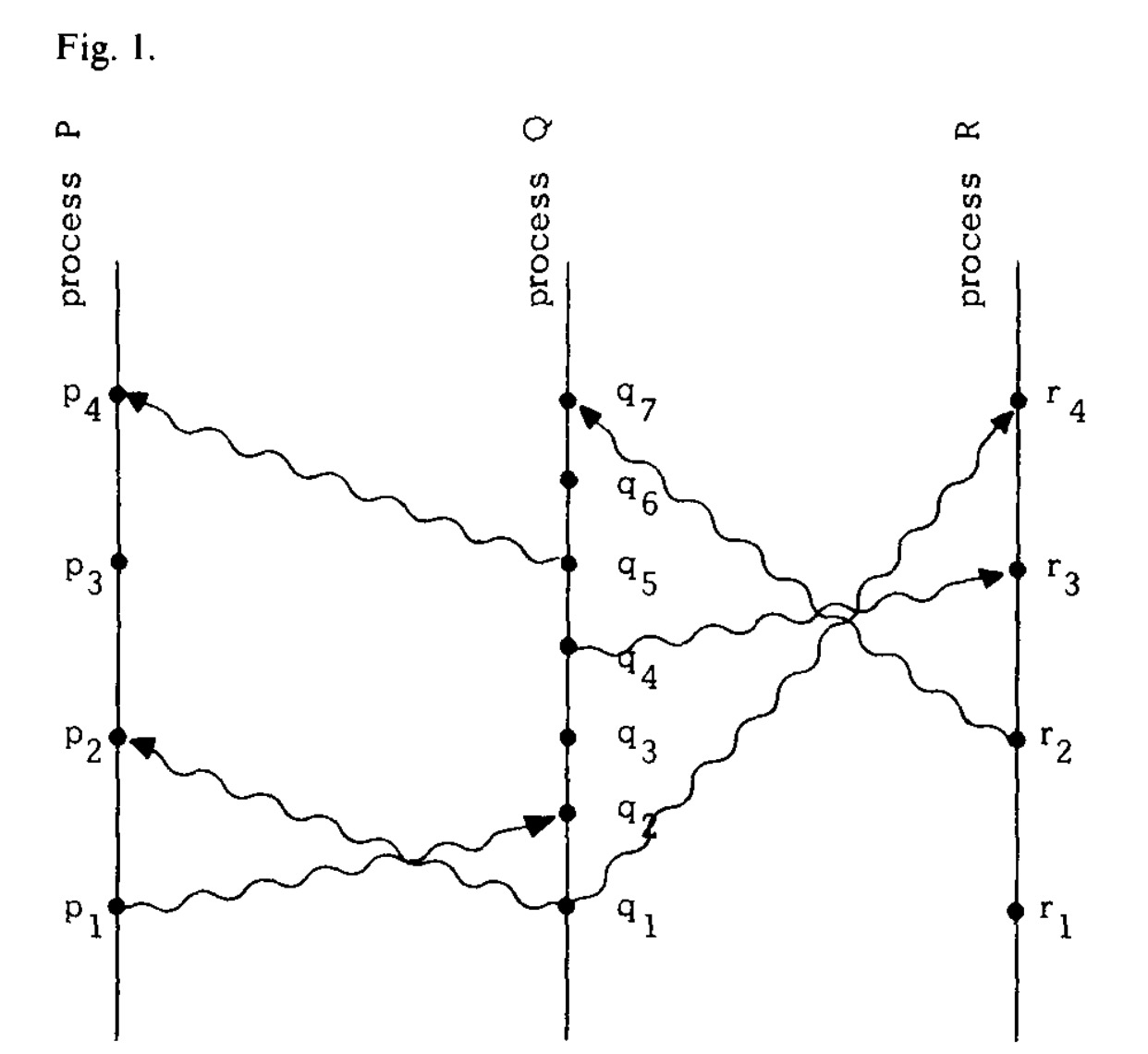
图1. space-time diagram
5. 逻辑时钟
a clock is just a way of assigning a number to an event.
时钟仅仅是对事件的发生予以编号而已。 更加准确地讲,对于每一个节点 $P_i$ 我们定义时钟 $C_i$ 为一个函数,它为任意的事件 $a$ 赋值编号为 $C_i \langle a \rangle$。对整个系统时钟来讲,任意事件 $b$ 的发生时间标记为 $ C \langle b \rangle $,如果其发生在节点 $P_j$ 上,则 $ C \langle b \rangle = C_j \langle b \rangle$。这里的时钟我们看做是系统内部的逻辑时钟,而非物理时钟,其标识与计数方法无需与物理时间一致。为了满足上文的"happened before"偏序关系,我们设计的逻辑时钟需要满足如下的Clock Condition.
Clock Condition. 对于系统中的任意事件 $a, b$:如果 $ a \rightarrow b$,则有 $C \langle a \rangle < C \langle b \rangle$。
- C1. 如果 $a$ 和 $b$ 是在相同节点 $P_i$ 上的两个事件,$a$ 在 $b$ 之前发生,则有 $C_i \langle a \rangle < C_i \langle b \rangle$。
- C2. 如果事件 $a$ 表示节点 $P_i$ 发送某条消息,$b$ 表示节点 $P_j$ 接受这条消息,则有$ C_i \langle a \rangle < C_j \langle b \rangle $。
特别的,Clock Condition的逆命题"如果 $C \langle a \rangle < C \langle b \rangle$,则有 $ a \rightarrow b$“并不一定成立。 因为它要求并发的事件必须具有相同的逻辑时间。例如图1中的 $p_2,p_3$ 都与 $q_3$ 为并发关系,但由 C1 有 $C \langle p_2 \rangle < C \langle p_3 \rangle$,则必然有 $C \langle q_3 \rangle \neq C \langle p_2 \rangle$ 或 $C \langle q_3 \rangle \neq C \langle p_3 \rangle$,与并发关系矛盾。
对于逻辑时钟,我们可以想象单个节点内不断发生着“tick”事件,例如在同一节点 $P_i$ 内连续发生的 $a, b$ 两个事件,有 $C_i \langle a \rangle = 4, C_i \langle b \rangle = 7$,那么在这两个事件之间发生了编号为 $5,6,7$ 的 tick 事件。于是我们可以在时空图中加入类似下图虚线所示的"tick line”。根据 C1 我们可以得到,在同一节点内的连续两个事件之间,至少要有一条 tick line。 根据 C2 我们可以得到,每一条消息必须穿过至少一条 tick line。
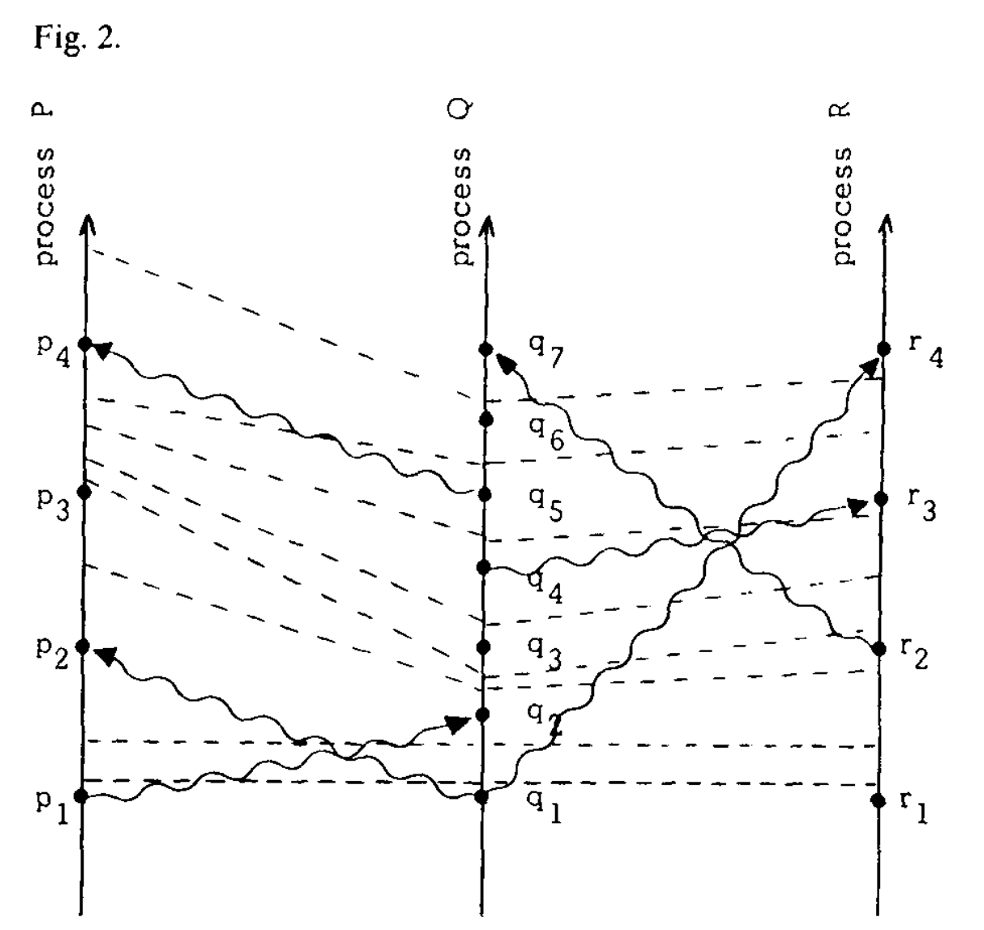
图2
为了更方便理解,我们也可以在保证事件和消息的偏序关系下,将 tick line 绘制成如下图中等价的水平线的形式。
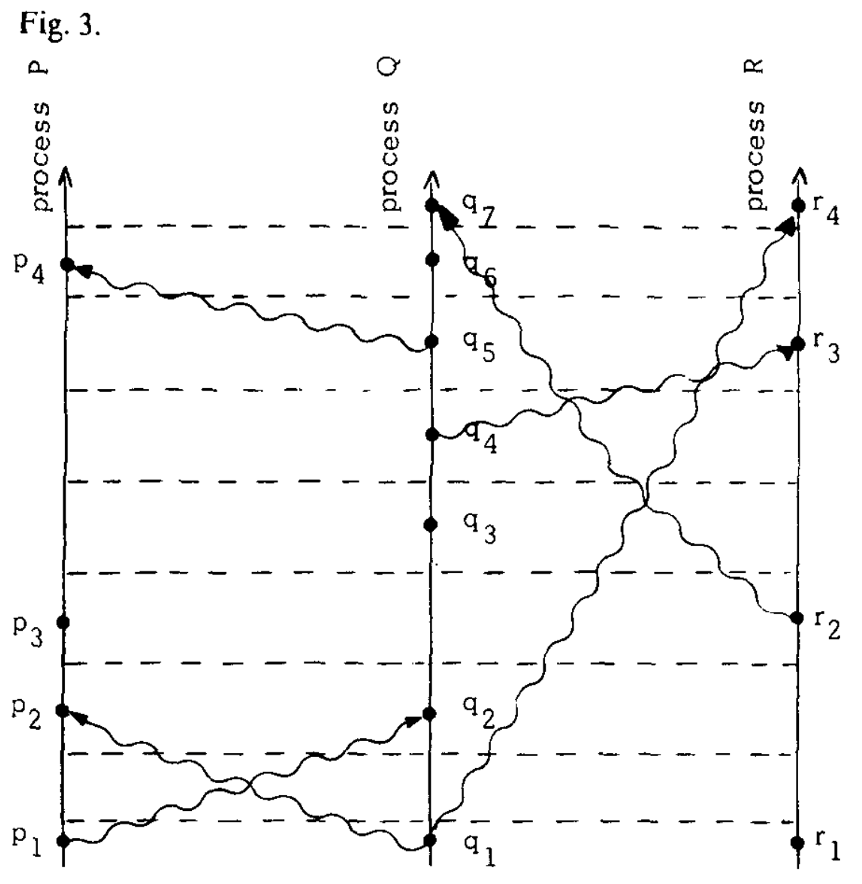
图3
对于单个节点上的逻辑时钟算法的实现,我们有如下的实现规则(Implementation Rule):
- IR1. 每个节点 $P_i$ 在任意连续的两个事件之间都要增加 $C_i$ 。
- IR2. (a) 如果事件 $a$ 表示节点 $P_i$ 发送消息 $m$ ,那么 $m$ 中包含时间戳 $T_m=C_i \langle a \rangle $。(b) 当收到消息 $m$ 时,进程 $P_j$ 设置当前时间 $C_j$ 为 $ C_j’$,使得 $C_j’ >= C_j$ 且 $C_j’ > Tm$ 。
在实践中,当我们收到某条消息后,应当先执行 IR2 修改时间,再执行具体事件,从而保证 Clock Condition。
6. 全序关系
利用逻辑时钟,我们可以对整个系统中的事件进行全序(total order)排序。我们首先根据事件发生的逻辑时间对其排序。对于发生时间相同的事件,我们引入对于所有节点的预先优先级 $\prec$,这里的优先级可以是根据 id 排序等任意规则。
更加严谨的说,我们定义全序关系 $\Rightarrow$。对于发生在节点 $P_i$ 的事件 $a$ 和发生在节点 $P_j$ 的事件 $b$,有 $ a \Rightarrow b $ 当且仅当 (i) $ C_i \langle a \rangle < C_j \langle b \rangle $ 或 (ii) $C_i \langle a \rangle = C_j \langle b \rangle$ 且 $P_i \prec P_j$。
这里由 Clock Condition 我们可以看到,凡是满足偏序关系 $\rightarrow$ 的,一定也满足全序关系 $\Rightarrow$。
图4. 偏序与全序关系
7. 物理时钟
7.1 系统之外
在全序关系下,由于系统之外的一些事件,使得我们有时会遇到一些反常行为。
考虑下面这种情况,某人在节点A上触发了事件A,随后打电话给另一个人。此人接到电话后在节点B上触发事件B。由于整个系统对于系统之外的事件“打电话”毫不知情,则有可能出现 $B \Rightarrow A$ 的情况。
我们可以定义系统中的所有事件集合为 $\varphi$。系统中的事件与外部事件的合集为 $\underline{\varphi}$。$\underline{\rightarrow}$ 为 $\underline{\varphi}$ 上的 happened before 关系。在上面的例子中,我们有 $A \underline{\rightarrow} B$,但 $A \nrightarrow B$。
显然没有任何算法能够不利用外部信息,仅凭 $\varphi$ 就能保证 $\underline{\rightarrow}$ 关系。在此,为了能够确保$A \rightarrow B$,有如下两种方案,
- 显式的引入外部信息。例如 $A$ 事件发生的逻辑时间为 $T_A$,在接到电话后,显式的告知系统 $B$ 的发生时间应大于 $T_A$。
- 构建满足如下Strong Clock Condition 的系统。
Strong Clock Condition. 对于 $\varphi$ 中的任意事件 $a, b$:如果$ a \underline{\rightarrow} b$ 则 $C \langle a \rangle < C \langle b \rangle$。
显然相较于方案1,Strong Clock Condition才是我们希望的方案。下面具体介绍如何实现满足Strong Clock Condition的物理时钟。
7.2 物理时钟实现
令 $C_i(t)$ 表示时钟 $C_i$ 在物理时间 $t$ 读到的读数。为了数学上的方便起见,在此我们认为 $C_i$ 对于 $t$ 是连续可微的,$dC_i(t)/dt$ 表示时钟在时间 $t$ 运行的速率。
为了使 $C_i$ 的运行速率与真实物理时钟相近,对于所有的 $t$,我们必须使得 $dC_i(t)/dt \approx 1$。更严谨的讲,我们需要满足如下条件,
- PC1. 存在一个常数 $\kappa \ll 1$,对于所有的 $i$ ,有 $| dC_i(t)/dt - 1 | < \kappa$。对于典型的晶控时钟(crystal controlled clock),$\kappa \leq 10^{-6}$。
除了保证单个时钟运行准确之外,各个时钟之间也需要保持同步,即所有的 $i,j,t$,有 $C_i(t) \approx C_j(t)$,
- PC2. 对于所有的 $i, j$,有$|C_i(t) - C_j(t)| < \epsilon$。直观来讲即图2中的单条 tick line 高度差不能太大。
对于 PC2,由于累计误差(accumulated error)的存在,两个完全独立运行的时钟必然会误差越来越大。因此我们需要某种算法对不同节点上的时钟进行对时。
首先我们假设我们的时钟满足Clock Condition.,这样我们只需考虑在 $\underline{\varphi}$ 中 $a \nrightarrow b$ 的情况。不难发现,此时 $a$ 与 $b$ 必然发生在不同的节点上。
令 $\mu$ 小于节点间的最小通信时延。即事件 $a$ 发生于物理时间 $t$,事件 $b$ 发生于另一节点,若 $ a\underline{\rightarrow} b$,则 $b$ 最早发生于 $t + \mu$。通常我们可以设定 $\mu$ 为节点间的最小距离除以光速。
为了避免上文中的反常情况,我们必须保证对于任意的 $i, j$ 和 $t$ ,有 $C_i(t + \mu) - C_j(t) > 0$。
结合PC1. 有 $C_i(t + \mu) - C_i(t) > (1- \kappa)\mu$,详细推导见附录8.2。
结合PC2. 有需保证 $ -\epsilon \geq -\mu(1 - k)$,则需有 $\epsilon/(1 - \kappa) \leq \mu$,详细推导见附录8.3。
7.2.1 物理时钟算法
下面介绍具体的的算法实现,从而保证上面的公式与PC1,PC2成立。
对于一条发送于物理时间 $t$ ,接收于物理时间 $t’$ 的消息 $m$。我们定义消息的总延迟(total delay) $ v_m = t’ - t$。接受消息的节点当然不知道 $v_m$ 的值,但是它可以知道这条消息的最小延迟(minimum delay) $\mu_m$, $\mu_m \geq 0$ 且 $\mu_m \leq v_m$。我们称 $\xi_m = v_m - \mu_m$ 为不可预测延迟(unpredictable delay)。
对于单个节点上的物理时钟算法的实现,我们有如下的实现规则(Implementation Rule):
- IR1’. 每个节点 $P_i$ 在物理时间 $t$ 没有收到任何消息,那么 $C_i$ 在 $t$ 时刻可微,且 $dC_i(t)/dt > 0$。
- IR2’. (a) 如果 $P_i$ 在物理时间 $t$ 发送消息 $m$ ,那么 $m$ 中包含时间戳 $T_m=C_i(t) $。(b) 当在物理时间 $t’$ 收到消息 $m$ 时,进程 $P_j$ 设置当前时间 $C_j(t’) = max(C_j(t’ - 0), T_m + \mu_m)$。其中$C_j(t’ - 0) = \underset{\delta \rightarrow 0}{ lim }C_j(t’-|\delta|)$。
7.2.1 物理时钟算法证明
现在我们证明上述的实现规则可以确保满足PC2。
将整个系统视为一个有向图,图中的点为各个节点,$P_i$ 到 $P_j$ 的有向边视为其消息链路。
令 $d$ 为有向图的直径(longest shortest path)。$\tau$ 为两个节点之间的最低通信间隔,即任意时间 $t$ 到 $t + \tau$之间,$P_i$ 至少应该发送一条消息给 $P_j$。下面的定理给出系统启动后,至多多久系统会达成满足PC2的时间同步。
定理:假设系统为一个遵循IR1’和IR2’,且直径为 $d$ 的强连通图。对于任意的消息 $m$,$\mu_m \leq \mu$,其中$\mu$ 为某个特定常数,且对于所有 $t \geq t_0$。 (a) PC1 总是成立。 (b) 存在常数 $\tau$ 和 $\xi$,在系统中每条边上,每$\tau$秒会转发一条不可预测延迟最大为 $\xi$ 的消息。则PC2 满足于,对于所有的 $t\gtrapprox t_0 + \tau d$,$\epsilon \approx d(2\kappa\tau + \xi)$,$\mu + \xi \ll \tau$。其证明见于附录8.4。
8.附录
8.1 全序关系的应用:互斥访问
- 资源必须要在正在访问它的节点释放后,才可以分配给其他节点访问。
- 按节点请求的顺序访问资源,先到先得。
- 如果每个访问资源的节点最终都会释放资源,那么所有请求访问的节点最终都可以成功访问。
8.2 PC1 推导
由PC1有 $\left | \frac{C_i(t+\mu) - C_i(t)}{\mu} < \kappa \right |$,则有 $(1 - \kappa)\mu < C_i(t+\mu) - C_i(t) < (1 + \kappa)\mu$ 。
8.3 PC2 推导
继8.2有,$C_i(t) + \mu(1-k) < C_i(t+\mu)$。
故要使得 $C_i(t + \mu) - C_j(t) > 0$,则需有 $C_i(t) - C_j(t) > -\mu(1 - k)$。
由PC2有,$C_i(t) - C_j(t) < -\epsilon$。
故而得,$ \epsilon \leq \mu(1 - k)$。
8.4 定理证明
对于任意的 $i$ 和 $t$,我们定义 $C_i^t$ 为一时钟,在时刻 $t$ 设定为 $C_i$ 并与 $C_i$ 运行速率相同,且永不被修正(reset)。即,
$$ C_i^t = C_i(t) + \int_{t}^{t’}[dC_i(t)/dt]dt \tag{1}$$
对于所有的 $t’ \geq t$,我们注意到由于 $C_i$ 会被修正,有
$$ C_i(t’) \geq C_i^t(t’) \tag{2}$$
假设 $P_1$ 在时刻 $t_1$ 发送消息给 $P_2$,接收于时刻 $t_2$,不可预测延迟 $\leq \xi$,$ t_0 \leq t_1 \leq t_2$。则对于所有的 $t \geq t_2$,我们有
$$ \begin{aligned} & C_2^{t_2}(t) \geq C_2^{t_2}(t_2) + (1 - \kappa)(t - t_2) & \qquad [by\ (1)\ and\ PC1] \\ & \geq C_1(t_1) + \mu_m + (1 - \kappa)(t - t_2) & \qquad [by\ IR2’(b)] \\ & = C_1(t_1) + (1 - \kappa)(t - t_1) - [(t_2 - t_1) - \mu_m] + \kappa(t_2 - t_1) \\ & \geq C_1(t_1) + (1 - \kappa)(t - t_1) - \xi \end{aligned} $$
因此,利用这些假设,我们可以得到,对于所有的$t \geq t2$,有
$$ C_2^{t_2}(t) \geq C_1(t_1) + (1 - \kappa)(t - t_1) - \xi \tag{3} $$
现在假设对于 $i =1,…,n$,我们有$ t_i \leq t_i’ < t_{i+1}, t_0 \leq t_1$。在 $t_i’$时,$P_i$ 发送一条消息给 $P_{i+1}$,该消息接收于 $t_{i+1}$,其不可预测延迟小于 $\xi$。反复应用等式(3)可以得到,对于 $t \geq t_{n+1}$,
$$ C_{n+1}^{t_{n+1}}(t) \geq C_1(t_1’) + (1 - \kappa)(t - t_1’) - n\xi \tag{4} $$
通过 PC1, IR1’, IR2’我们可以推导出,
$$ C_1(t_1’) \geq C_1(t_1) + (1 - \kappa)(t_1’ - t_1) $$
再结合(4)与(2),我们可以得到对于 $t \geq t_{n+1}$,有
$$ C_{n+1}(t) \geq C_1(t_1) + (1 - \kappa)(t - t_1) - n\xi \tag{5} $$
对于任意的两个节点 $P$ 和 $P’$,我们能找到一个节点序列 $P = P_0, P_1, …, P_{n+1} = P’, n \leq d$。通过假设 (b),我们能找到时间 $t_i, t_i’$,有 $ t_i’ - t_i \leq \tau $ 且 $ t_{i+1} - t_i’ \leq v $,其中 $v=\mu + \xi$。因此不等式 (5) 成立于对于任何的$t \geq t_1 + d(\tau + v)$, 有$ n \leq d$。对于任意的$i, j, t, t_1$,其中 $ t_1 \geq t_0 $ 且 $ t \geq t_1 + d(\tau + v) $,我们因此有
$$ C_i(t) \geq C_j(t_1) + (1 - \kappa)(t - t_1) - d\xi \tag{6} $$
令 $m$ 为任意时间戳为 $T_m$ 的消息,其在 $t$ 时刻发送,在 $t’$ 时刻接收。我们假设 $m$ 有一个以一个恒定速率运行的时钟 $C_m$,且有 $C_m(t)=t_m$,$C_m(t’) = t_m + \mu_m$。那么由 $ \mu_m \leq t’ - t $ 可以推导出 $dC_m/dt \leq 1$。规则 IR2’(b)将 $C_j(t’)$ 设置为 $max(C_j(t’ - 0), C_m(t’))$。因此,当时钟被重置时,只可能重置与其他某个时钟相等。
对于任意时间 $t_x \geq t_0 + \mu/(1-\kappa)$,令 $C_x$ 为 $t_x$ 时刻具有最大值的时钟。由于所有的时钟以低于 $1+\kappa$ 的速率运行,我们有对于所有的 $i$ 和所有的 $t \geq t_x$:
$$ C_i(t) \leq C_x(t_x) + (1 + \kappa)(t - t_x) \tag{7} $$
现在我们考虑如下两种情况:(i)$C_x$ 为节点 $P_q$ 的时钟 $C_q$。(ii)$C_x$ 为节点 $P_q$ 在 $t_1$ 时刻发送于消息 $m$ 的时钟。在情况(i)中,(7)简单的成为,
$$ C_i(t) \leq C_q(t_x) + (1 + \kappa)(t - t_x) \tag{8i} $$
在情况(ii)中,由于 $C_m(t_1)=C_q(t_1)$,且 $dC_m/dt \leq 1$,我们有,
$$ C_x(t_x) \leq C_q(t_1) + (t_x - t_1) $$
因此,由(7)有,
$$ C_i(t) \leq C_q(t_1) + (1 - \kappa)(t - t_1) \tag{8ii} $$
由于 $t_x \geq t_0 + \mu/(1 - \kappa)$,我们有,
$$ \begin{aligned} & C_q(t_x - \mu/(1 - \kappa)) \leq C_q(t_x) - \mu & \qquad [by\ PC1] \\ & \leq C_m(t_x) - \mu & \qquad [by\ choice \ of \ m] \\ & \leq C_m(t_x) - (t_x - t_1)\mu_m/v_m & \qquad [\mu_m \leq \mu, t_x - t_1 \leq v_m] \\ & = T_m & \qquad [by\ definition \ of \ C_m] \\ & = C_q(t_1) & \qquad [by\ IR2’(a)] \end{aligned} $$
因此,$ C_q(t_x - \mu/(1 - \kappa)) \leq C_q(t_1) $,因此 $ t_x - t_1 \leq \mu(1 - \kappa), t_1 \geq t_0 $。
令 $ t_1 = t_x $,对于情况(i),我们结合(8i)和(8ii)可以推出对于任意的 $t,t_x$,且$t \geq t_x \geq t_0 + \mu/(1 - \kappa)$,存在一个节点 $P_q$ 和一个时间 $t_1$,$t_x - \mu/(1 - \kappa)\leq t_1 \leq t_x$,对于所有的 $ i $,
$$ C_i(t) \leq C_q(t_1) + (1 + \kappa)(t - t_1) \tag{9} $$
若我们选择的 $t$ 和 $t_x$ 满足 $t \geq t_x + d(\tau + v)$,我们可以结合(6)和(9)得到存在一个时间 $t_1$ 和一个节点 $P_q$,对于所有的 $i$,
$$ C_q(t_1) + (1 - \kappa)(t - t_1) - d\xi \leq C_i(t) \leq C_q(t_1) + (1 - \kappa)(t - t_1) \tag{10} $$
令 $t = t_x + d(\tau + v)$,我们有,
$$ d(\tau + v) \leq t - t_1 \leq d(\tau + v) + \mu(1 - \kappa) $$
结合(10),我们有,
$$ C_q(t_1) + (t - t_1) - \kappa d(\tau + v) - d\xi \leq C_i(t) \leq C_q(t_1) + (t - t_1) + \kappa[d(\tau + v) + \mu/(1 - \kappa)] \tag{11} $$
结合假设 $\kappa \ll 1$ 以及 $\mu \leq v \ll \tau$,我们可以重写(11)为,
$$ C_q(t_1) + (t - t_1) - d(\kappa\tau + \xi) \lessapprox C_i(t) \lessapprox C_q(t_1) + (t - t_1) + d\kappa\tau \tag{12} $$
由于上式对于所有的 $i$ 成立,我们有,
$$ |C_i(t) - C_j(t)| \lessapprox d(2\kappa\tau + \xi) $$
上式对于所有的 $t \gtrapprox t_0 + d\tau $ 均成立。
证毕。